

Summary: Researchers have developed a new method that generates fully functioning skeletal muscle tissue, which they incorporated into a biohybrid robot. The robot was able to generate fluid movement and continued muscle function for over a week.
Source: University of Tokyo.
The new field of biohybrid robotics involves the use of living tissue within robots, rather than just metal and plastic. Muscle is one potential key component of such robots, providing the driving force for movement and function. However, in efforts to integrate living muscle into these machines, there have been problems with the force these muscles can exert and the amount of time before they start to shrink and lose their function.
Now, in a study reported in the journal Science Robotics, researchers at The University of Tokyo Institute of Industrial Science have overcome these problems by developing a new method that progresses from individual muscle precursor cells, to muscle-cell-filled sheets, and then to fully functioning skeletal muscle tissues. They incorporated these muscles into a biohybrid robot as antagonistic pairs mimicking those in the body to achieve remarkable robot movement and continued muscle function for over a week.
The team first constructed a robot skeleton on which to install the pair of functioning muscles. This included a rotatable joint, anchors where the muscles could attach, and electrodes to provide the stimulus to induce muscle contraction. For the living muscle part of the robot, rather than extract and use a muscle that had fully formed in the body, the team built one from scratch. For this, they used hydrogel sheets containing muscle precursor cells called myoblasts, holes to attach these sheets to the robot skeleton anchors, and stripes to encourage the muscle fibers to form in an aligned manner.
“Once we had built the muscles, we successfully used them as antagonistic pairs in the robot, with one contracting and the other expanding, just like in the body,” study corresponding author Shoji Takeuchi says. “The fact that they were exerting opposing forces on each other stopped them shrinking and deteriorating, like in previous studies.”
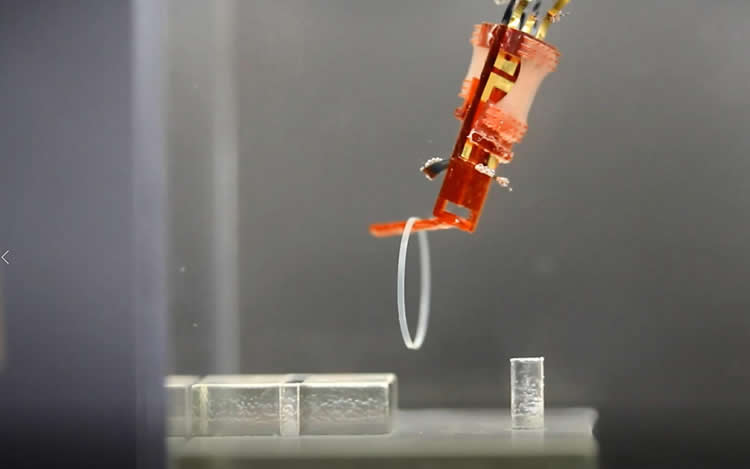
The team also tested the robots in different applications, including having one pick up and place a ring, and having two robots work in unison to pick up a square frame. The results showed that the robots could perform these tasks well, with activation of the muscles leading to flexing of a finger-like protuberance at the end of the robot by around 90°.
“Our findings show that, using this antagonistic arrangement of muscles, these robots can mimic the actions of a human finger,” lead author Yuya Morimoto says. “If we can combine more of these muscles into a single device, we should be able to reproduce the complex muscular interplay that allow hands, arms, and other parts of the body to function.”
Source: Shoji Takeuchi – University of Tokyo
Publisher: Organized by NeuroscienceNews.com.
Image Source: NeuroscienceNews.com image is credited to University of Tokyo.
Original Research: Open access research for “Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues” by Yuya Morimoto, Hiroaki Onoe and Shoji Takeuchi in Science Robotics. Published May 30 2018.
doi:10.1126/scirobotics.aat4440
[cbtabs][cbtab title=”MLA”]University of Tokyo “Cometh the Cybog: Improved Integration of Living Muscles into Robots.” NeuroscienceNews. NeuroscienceNews, 4 June 2018.
<https://neurosciencenews.com/robotics-living-muscles-9249/>.[/cbtab][cbtab title=”APA”]University of Tokyo (2018, June 4). Cometh the Cybog: Improved Integration of Living Muscles into Robots. NeuroscienceNews. Retrieved June 4, 2018 from https://neurosciencenews.com/robotics-living-muscles-9249/[/cbtab][cbtab title=”Chicago”]University of Tokyo “Cometh the Cybog: Improved Integration of Living Muscles into Robots.” https://neurosciencenews.com/robotics-living-muscles-9249/ (accessed June 4, 2018).[/cbtab][/cbtabs]
Abstract
Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues
Biohybrid robots are attracting attention as promising candidates to enhance robot applicability to studies on biological designs and in vitro construction of biological dynamic systems. Rapid progress in biohybrid robots with skeletal muscle tissues formed on a flexible substrate has enabled various types of locomotion powered by muscle tissue. However, it has been difficult to achieve high levels of both large and long-term actuations of the skeletal muscle tissues because of their spontaneous shrinkage through the course of the tissue culture. To overcome this limitation, we adapted the concept of biological systems and developed a biohybrid robot actuated by an antagonistic pair of skeletal muscle tissues. Our robot achieved large actuation (~90° of rotation of a joint) by selective contractions of the skeletal muscle tissues and a long lifetime (~1 week) by balancing tensions of the antagonistic tissues to prevent the spontaneous shrinkage. As a demonstration, we showed that our biohybrid robots allowed a pick-and-place manipulation of objects. This research may provide a platform to exceed the limitations of design in conventional biohybrid robots and replicate various lifelike movements.




