Summary: A new method is able to efficiently design and fabricate soft robots using 3D printing technology. The ASM can perform complex motions, such as gripping and crawling.
Source: Purdue University
The world’s elderly population is booming. The number of older people — those age 60 years or older — is expected to more than double by 2050 and is growing faster than all younger age groups across the globe.
This trend comes with an increasing demand for caregivers capable of providing 24-hour care, not only at hospitals or nursing homes but also at private homes and apartments.
Already, caregiving robots are programmed to ask questions a nurse would ask and can monitor patients for falls. These robotic assistants are expected to become increasingly marketable and reach 450,000 by 2045 because of the expected caregiver shortage in the United States.
“Unfortunately, the external hard structure of current caregiving robots prevents them from a safe human-robot interaction, limiting their assistance to mere social interaction and not physical interaction,” said Ramses Martinez, an assistant professor in the School of Industrial Engineering and in the Weldon School of Biomedical Engineering in Purdue’s College of Engineering. “After all, would you leave babies or physically or cognitively impaired old people in the hands of a robot?”
Recent advances in material science have enabled the fabrication of robots with deformable bodies or the ability to reshape when touched, but the complex design, fabrication, and control of soft robots currently hinders the commercialization of this technology and its use for at-home applications.
Martinez and other Purdue University researchers have developed a new design method that shows promise in enabling the efficient design and fabrication of soft robots using a 3D printer. The technology is published in the April 8 edition of Advanced Functional Materials.
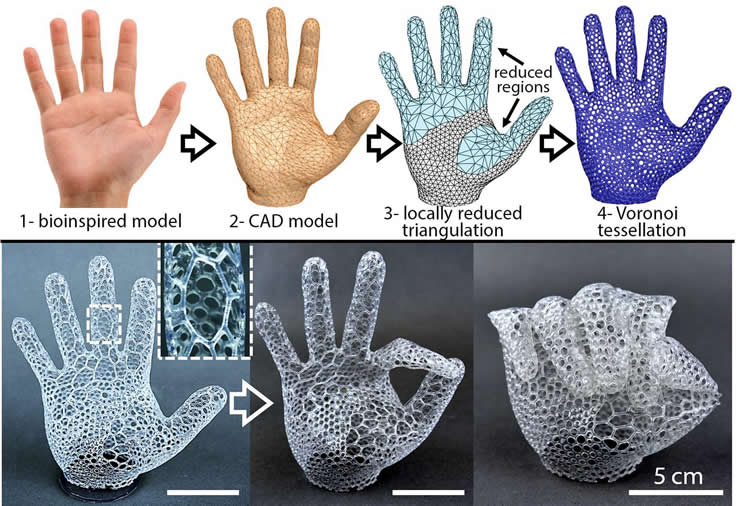
The design process involves three steps. First, a user makes a computer-aided design file with the shape of the robot. The user then paints the CAD file to show which directions the different joints of the soft robot will move. A fast computer algorithm takes a few seconds to convert the CAD model into a 3D architected soft machine (ASM) that can be printed using any conventional 3D printer.
The architected soft machines move like humans, except instead of muscles they rely on miniaturized motors that pull from nylon lines tied to the ends of their limbs. They can be squeezed and stretched to more than 900 percent of their original length.
“ASMs can perform complex motions such as gripping or crawling with ease, and this work constitutes a step forward toward the development of autonomous and lightweight soft robots,” Martinez said. “The capability of ASMs to change their body configuration and gait to adapt to a wide variety of environments has the potential to not only improve caregiving but also disaster-response robotics.”
Credit FlexiLab Purdue
The technology is patented through the Purdue Office of Technology Commercialization. The researchers are looking for partners to test and commercialize their technology.
Their work aligns with Purdue’s Giant Leaps celebration, acknowledging the university’s global advancements in artificial intelligence and health as part of Purdue’s 150th anniversary. Those are two of the four themes of the yearlong celebration’s Ideas Festival, designed to showcase Purdue as an intellectual center solving real-world issues.
Source:
Purdue University
Media Contacts:
Chris Adam – Purdue University
Image Source:
The image is credited to Ramses Martinez/Purdue University.
Original Research: Closed access.
“3D‐Architected Soft Machines with Topologically Encoded Motion”
Debkalpa Goswami Shuai Liu Aniket Pal Lucas G. Silva Ramses V. Martinez. First published: 08 April 2019 Advanced Functional Materials. doi:10.1002/adfm.201808713
Abstract
3D‐Architected Soft Machines with Topologically Encoded Motion
The limited range of mechanical responses achievable by materials compatible with additive manufacturing hinders the 3D printing of continuum soft robots with programmed motion. This paper describes the rapid design and fabrication of low‐density, 3D‐architected soft machines (ASMs) by combining Voronoi tessellation and additive manufacturing. On tendon‐based actuation, ASMs deform according to the topologically encoded buckling of their structure to produce a wide range of motions (contraction, twisting, bending, and cyclic motion). ASMs exhibiting densities as low as 0.094 g cm−3 (≈8% of bulk polymer) can be rapidly built by the stereolithographic 3D printing of flexible photopolymers or the injection molding of elastomers. The buckling of ASMs can be programmed by inducing gradients in the thickness of their flexible beams or by the localized enlargement of the Voronoi cells to generate complex motions such as multi‐finger gripping or quadrupedal locomotion. The topological architecture of these low‐density soft robots confers them with the stiffness necessary to recover their original shape even after ultrahigh compression (400%) and extension (500%). ASMs expand the range of mechanical properties currently achievable by 3D printed or molded materials to enable the fabrication of soft machines with auxetic mechanical metamaterial properties.