While it takes a long time to learn to control neuroprostheses, José del R. Millán’s research, published in Scientific Reports, will enable the creation of a new generation of self-learning and easy to use devices.
Brain-Machine Interfaces (BMI) are a great hope for thousands of patients affected by the most various motor impairments, notably paralysis. Patients fitted with such equipment can control artificial limbs through electrodes connected to their brains. In an article published today in Scientific Reports, José Millán describes the application of an innovative technology that may allow the development of a new generation of BMIs.
Most BMI operate by interpreting variations in the electrical activity of the brain, in particular through an electroencephalogram. To be effective, such a method requires significant training on the patient’s side. They must succeed in communicating the desired information (eg, “extend left arm”) by modulating their brain activity. The results are encouraging but come up against two limits no matter how the brain electrical signals are recorded -invasively or not. Patients must spend a lot of time to learn to use their neuroprosthesis and despite this training, they are not able to perform some complex movements.
An “error signal”
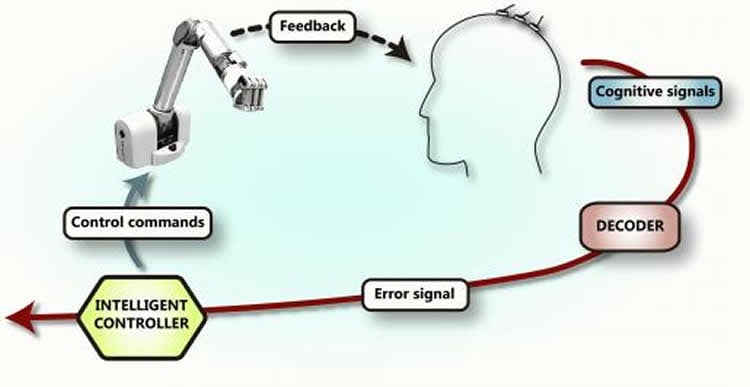
When missing a step, the brain emits an electrical signal signifying the failure of the action. This signal is called Error-related potential (ErrP). José Millán, whose seminal work in the field of BMI was noted by the journal Science, uses this signal to develop a new generation of neuroprostheses. “With ErrPs, it is the machine itself that will learn to make the right movements.” The EPFL professor calls this innovation a “paradigm shift.”
The detection of this “error signal” allowed José Millán’s team to create a new generation of neuroprostheses. They are capable of learning the proper movements based on ErrP. For example, if we fail to grasp a glass of water placed in front of us, the neuroprosthesis will understand that the action was unsuccessful and the next movements will change accordingly until the desired result is achieved. The machine knows that the goal is reached when the actions performed no longer generate an ErrP.
The paradigm shift lies in the use of these signals to relieve the subject from the tedious task of learning. This approach could be the source of a new generation of intelligent prostheses, able to learn a wide range of movements. Indeed, with the support of the ErrP decoder, it is theoretically possible to learn and master quickly enough a multitude of motor movements, even the most complex ones.
25 minutes to train its decoder
The twelve subjects of the experiment were first asked to train their prosthesis to detect ErrP. Equipped with an electrode headset, they observed the machine, programmed to fail in 20% of cases, performing 350 separate movements. The setting of the ErrP detector lasted on average 25 minutes. Once this first step was completed, the subjects performed three experiments to evaluate the effectiveness of this new approach. In the last one, they were asked to identify a specific target using a robotic arm placed two meters away. In all three experiments, the neuroprosthesis demonstrated interesting learning capabilities by continuously adapting its actions and enhancing its precision.
Indeed, the artificial arm stores the correct movements and builds an increasing repertoire of appropriates motors actions. This capability could be particularly useful for people with neurodegenerative diseases, allowing them to compensate almost organically the loss of motor function. “According to our expectations, this new approach will become a key element of the next generation brain-machine interfaces that mimic the natural motor control. The prosthesis can function even if it does not have clear information about the target,” concluded José Millán.
This research was conducted in partnership with the Department of Computer Systems Engineering Research Institute of Aragon, University of Zaragoza (Spain), including Luis Montesano, Javier Minguez. Besides Professor Millán, Iñaki Iturrate and Ricardo Chavarriaga, from the Center for Neuroprosthetics and the Institute of Bioengineering at EPFL, also participated in this project.
Source: Alexandre Babin – EPFL
Image Source: The image is credited to The researchers/Scientific Reports and is adapted from the EPFL press release
Original Research: Full open access research for “Teaching brain-machine interfaces as an alternative paradigm to neuroprosthetics control” by Iñaki Iturrate, Ricardo Chavarriaga, Luis Montesano, Javier Minguez and José del R. Millán in Scientific Reports. Published online September 10 2015 doi:10.1038/srep13893
Abstract
Teaching brain-machine interfaces as an alternative paradigm to neuroprosthetics control
Brain-machine interfaces (BMI) usually decode movement parameters from cortical activity to control neuroprostheses. This requires subjects to learn to modulate their brain activity to convey all necessary information, thus imposing natural limits on the complexity of tasks that can be performed. Here we demonstrate an alternative and complementary BMI paradigm that overcomes that limitation by decoding cognitive brain signals associated with monitoring processes relevant for achieving goals. In our approach the neuroprosthesis executes actions that the subject evaluates as erroneous or correct, and exploits the brain correlates of this assessment to learn suitable motor behaviours. Results show that, after a short user’s training period, this teaching BMI paradigm operated three different neuroprostheses and generalized across several targets. Our results further support that these error-related signals reflect a task-independent monitoring mechanism in the brain, making this teaching paradigm scalable. We anticipate this BMI approach to become a key component of any neuroprosthesis that mimics natural motor control as it enables continuous adaptation in the absence of explicit information about goals. Furthermore, our paradigm can seamlessly incorporate other cognitive signals and conventional neuroprosthetic approaches, invasive or non-invasive, to enlarge the range and complexity of tasks that can be accomplished.
“Teaching brain-machine interfaces as an alternative paradigm to neuroprosthetics control” by Iñaki Iturrate, Ricardo Chavarriaga, Luis Montesano, Javier Minguez and José del R. Millán in Scientific Reports. Published online September 10 2015 doi:10.1038/srep13893