Summary: Researchers have developed a new robot that can detect odors from sources on the ground.
Source: ACS.
Bloodhounds are famous for their ability to track scents over great distances. Now researchers have developed a modern-day bloodhound – a robot that can rapidly detect odors from sources on the ground, such as footprints. The robot, reported in ACS Sensors, could even read a message written on the ground using odors as a barcode.
Over the past two decades, researchers have tried to develop robots that rival the olfactory system of bloodhounds. However, most robots can only detect airborne odors, or they are painstakingly slow at performing analyses. Zhongyuan Yang, Fumihiro Sassa and Kenshi Haysashi wanted to develop a robot with a high-speed gas sensor that could rapidly track invisible odor sources on the ground.
The researchers based their odor sensor on a technique called localized surface plasmon resonance (LSPR) that measured changes in light absorption by gold nanoparticles upon exposure to a gas. As the robot traveled across a surface, a tube placed close to the ground suctioned odors into the LSPR sensor. The researchers showed that the sensor could accurately detect the location of ethanol odor sources placed at different positions along the robot’s path, at a travel speed of 10 centimeters/second (about 4 inches/second).
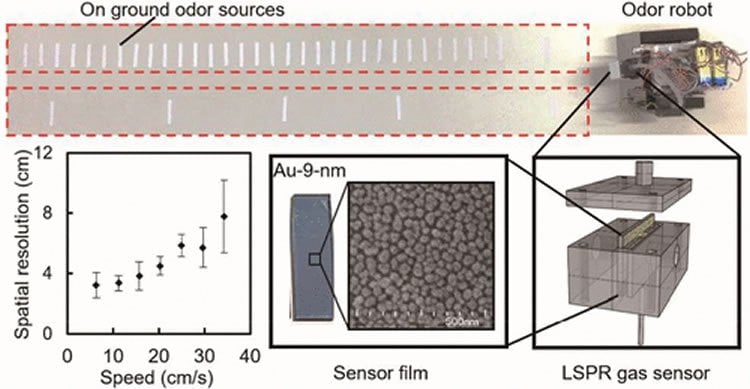
In addition, the robot could read the word “ODOR” in binary barcode deposited on the ground as a series of ethanol marks at different positions. The robot has great potential in a multi-robot communication system or as a security robot working in an office, the researchers say.
Funding: The authors acknowledge funding from SECOM Science and Technology Foundation for Research Grants and Japan Society for the Promotion of Science KAKENHI.
Source: Katie Cottingham – ACS
Publisher: Organized by NeuroscienceNews.com.
Image Source: NeuroscienceNews.com image is credited to Haysashi et al./ACS Sensors.
Original Research: Abstract for “A Robot Equipped with a High-Speed LSPR Gas Sensor Module for Collecting Spatial Odor Information from On-Ground Invisible Odor Sources” by Zhongyuan Yang, Fumihiro Sassa and Kenshi Haysashi in ACS Sensors. Published May 30 2018
doi:10.1021/acssensors.8b00214
[cbtabs][cbtab title=”MLA”]ACS “Robotic Bloodhound Tracks Odors on the Ground.” NeuroscienceNews. NeuroscienceNews, 20 June 2018.
<https://neurosciencenews.com/odor-robotic-bloodhound-9386/>.[/cbtab][cbtab title=”APA”]ACS (2018, June 20). Robotic Bloodhound Tracks Odors on the Ground. NeuroscienceNews. Retrieved June 20, 2018 from https://neurosciencenews.com/odor-robotic-bloodhound-9386/[/cbtab][cbtab title=”Chicago”]ACS “Robotic Bloodhound Tracks Odors on the Ground.” https://neurosciencenews.com/odor-robotic-bloodhound-9386/ (accessed June 20, 2018).[/cbtab][/cbtabs]
Abstract
A Robot Equipped with a High-Speed LSPR Gas Sensor Module for Collecting Spatial Odor Information from On-Ground Invisible Odor Sources
Improving the efficiency of detecting the spatial distribution of gas information with a mobile robot is a great challenge that requires rapid sample collection, which is basically determined by the speed of operation of gas sensors. The present work developed a robot equipped with a high-speed gas sensor module based on localized surface plasmon resonance. The sensor module is designed to sample gases from an on-ground odor source, such as a footprint material or artificial odor marker, via a fine sampling tubing. The tip of the sampling tubing was placed close to the ground to reduce the sampling time and the effect of natural gas diffusion. On-ground ethanol odor sources were detected by the robot at high resolution (i.e., 2.5 cm when the robot moved at 10 cm/s), and the reading of gas information was demonstrated experimentally. This work may help in the development of environmental sensing robots, such as the development of odor source mapping and multirobot systems with pheromone tracing.