Summary: Researchers have developed a new, fully automated prosthetic arm that learns during normal use and adapts to varying conditions.
Source: Aalto University
Aalto University doctoral candidate Dennis Yeung and his research group have developed and tested a new type of technology that enables better compatibility between a prosthesis and the amputated area.
The study was conducted in cooperation with HUS (Helsinki University Hospital) and Imperial College London.
People whose upper limb has been amputated can control the robotic prosthesis by contracting their remaining muscles. The connection where a prosthesis detects electrical signals produced by the muscle is known as a myoelectric interface. The most advanced prostheses use machine learning algorithms that help interpret these user-generated signals.
However, such connections are often very sensitive to external factors, such as sweating, and become weaker over time.
To solve this problem, the research community has proposed various algorithms that could better adapt to changing circumstances.
Currently, existing systems require adjustments or other measures from the user, but Yeung and his team developed a fully automated system that learns during normal use and thus adapts to varying conditions.
“In this system, the user and the system learn from each other simultaneously. This has potential benefits in improving the convenience and robustness of robotic prostheses,” Yeung says.
More reliable prostheses
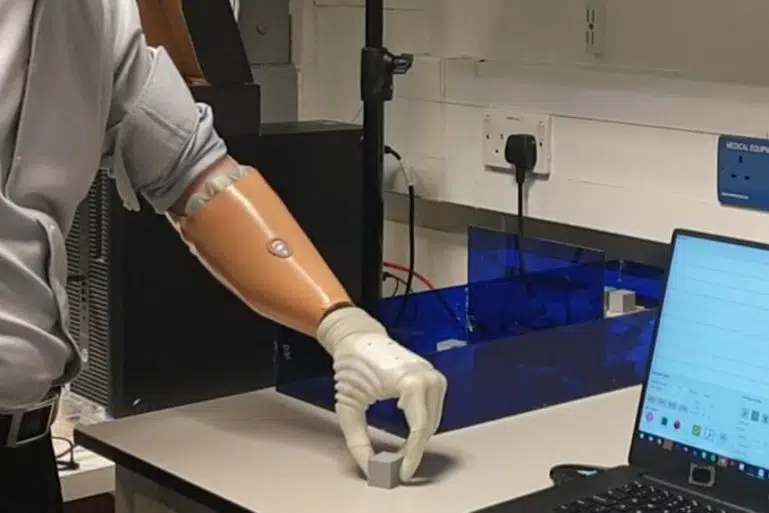
The research results were tested in a virtual environment where they were compared to currently existing systems. After these successful tests, the research team tested the user interface with a state-of-the-art prosthesis at Imperial College London by having an amputee conduct Clothespin Relocation Tests which are widely used by physiotherapists to assess the function of the upper limbs.
Adaptive prosthetic devices are rather expensive. Improving the reliability of the systems reduces the financial risks for individuals and public health institutions when obtaining prostheses.
The functionality of the system has been studied with controlled and standardized tests, but the needs of the users can best be determined with qualitative longitudinal studies.
“For future development, it is very important to continue cooperation with health care centers and prosthesis users,” Yeung says.
About this neuroprosthetics research news
Author: Press Office
Source: Aalto University
Contact: Press Office – Aalto University
Image: The image is credited to Aalto University
Original Research: Open access.
“Co-adaptive control of bionic limbs via unsupervised adaptation of muscle synergies” by Dennis Yeung et al. IEEE Transactions on Biomedical Engineering
Abstract
Co-adaptive control of bionic limbs via unsupervised adaptation of muscle synergies
Objective: In this work, we present a myoelectric interface that extracts natural motor synergies from multi-muscle signals and adapts in real-time with new user inputs. With this unsupervised adaptive myocontrol (UAM) system, optimal synergies for control are continuously co-adapted with changes in user motor control, or as a function of perturbed conditions via online non-negative matrix factorization guided by physiologically informed sparseness constraints in lieu of explicit data labelling.
Methods: UAM was tested in a set of virtual target reaching tasks completed by able-bodied and amputee subjects. Tests were conducted under normative and electrode perturbed conditions to gauge control robustness with comparisons to non-adaptive and supervised adaptive myocontrol schemes. Furthermore, UAM was used to interface an amputee with a multi-functional powered hand prosthesis during standardized Clothespin Relocation Tests, also conducted in normative and perturbed conditions.
Results: In virtual tests, UAM effectively mitigated performance degradation caused by electrode displacement, affording greater resilience over an existing supervised adaptive system for amputee subjects. Induced electrode shifts also had negligible effect on the real world control performance of UAM with consistent completion times (23.91±1.33 s) achieved across Clothespin Relocation Tests in the normative and electrode perturbed conditions.
Conclusion: UAM affords comparable robustness improvements to existing supervised adaptive myocontrol interfaces whilst providing additional practical advantages for clinical deployment.
Significance: The proposed system uniquely incorporates neuromuscular control principles with unsupervised online learning methods and presents a working example of a freely co-adaptive bionic interface.